तुल्यकालिक मोटर अनुक्रम संरचना उपयोग स्टार्ट करने की विधियाँ तुल्यकालिक मोटरोंके प्रकार इन्हें भी देखें बाहरी कड़ियाँ दिक्चालन सूचीSynchronous motor animationबढ़ाने मेंसं
विद्युत मोटर
प्रत्यावर्ती धाराविद्युत मोटरशक्ति गुणांकप्रेरण मोटर

त्रिफेजी तुल्यकालिक मोटर के रोटर का घूमना : स्टेटर में एक घूर्णी चुम्बकीय क्षेत्र बनता है जो तीनों वाइण्डिग्स के द्वारा उत्पन्न चुम्बकीय क्षेत्र के योग के बराबर होता है।

त्रिफेजी तुल्यकालिक मोटर का टॉर्क-स्पीड वक्र
त्रिफेजी तुल्यकालिक मोटर के रोटर का घूमना : स्टेटर में एक घूर्णी चुम्बकीय क्षेत्र बनता है जो तीनों वाइण्डिग्स के द्वारा उत्पन्न चुम्बकीय क्षेत्र के योग के बराबर होता है।
त्रिफेजी तुल्यकालिक मोटर का टॉर्क-स्पीड वक्र
तुल्यकालिक मोटर या सिन्क्रोनस मोटर प्रत्यावर्ती धारा से चलने वाली विद्युत मोटर है। इसका नाम तुल्याकालिका मोटर या सिन्क्रोनस मोटर इस कारण है क्योंकि इसके रोटर की घूर्णन गति ठीक-ठीक उतनी ही होती है जितनी स्टेटर में निर्मित घूर्णी चुम्बकीय क्षेत्र (rotating magnetic field) की गति होती है। इस मोटर का उपयोग प्रायः किसी लोड को घुमाने में नहीं किया जाता बल्कि शक्ति गुणांक को सुधारने में किया जाता है।
विशेष स्थितियों में इसका उपयोग लोड चलाने में भी किया जाता है।
सिन्क्रोनस चाल,
- n=120⋅fpdisplaystyle n=frac 120cdot fp

जहाँ:
- f: स्टेटर में लगायी गये प्रत्यावर्ती वोल्टेज की आवृत्ति (Hz)
- p: मोटर के ध्रुवों (पोल्स) की संख्या
- n: रोटर की चाल (चक्कर प्रति मिनट)
अनुक्रम
1 संरचना
2 उपयोग
2.1 शक्ति गुणांक को उन्नत बनाने के लिये
3 स्टार्ट करने की विधियाँ
4 तुल्यकालिक मोटरोंके प्रकार
5 इन्हें भी देखें
6 बाहरी कड़ियाँ
संरचना

तुल्यकालिक मोटर के अन्दर की संरचना
तुल्यकालिक मोटर के मुख्य भाग हैं- स्टेटर और रोटर। इसकी स्टेटर भी प्रेरण मोटर के समान ही होती है जिस पर तीन-फेजी वाइण्डिंग की गयी होती है। रोटर पर या तो स्थायी चुम्बक से चुम्बकीय क्षेत्र पैदा किया जाता है या रोटर पर निर्मित विद्युतचुम्बकों में डीसी देकर पैदा किया जाता है। बाहर से इस डीसी को रोटर पर लाने के लिये स्लिप रिंग का प्रयोग करना पड़ता है। बड़ी-बड़ी मोटरों में उसी शैफ्ट पर एक डी सी जनित्र बैठा दिया जाता है। इससे प्राप्त डीसी को रोटर पर बने विद्युत्चुम्बकों को दिया जाता है।
रचना के आधार पर रोटर दो तरह के होते हैं-
- सैलिएण्ट रोटर
- बेलनाकार रोटर
उपयोग
शक्ति गुणांक को उन्नत बनाने के लिये
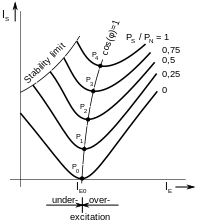
तुल्यकालिक मोटर के वी-कर्व' (इनका आकार अंग्रेजी अक्षर V से मिलते हैं।)
तुल्यकालिक मोटर को 'ओवर-इक्साइट' करके चलाने पर इसके द्वारा ली गयी धारा इसके वोल्टेज से अग्रगामी (लीडिंग) होती है। इसी आधार पर यह शक्ति गुणांक को बढाने के लिये उपयोग में लाया जा सकता है। इसकी सबसे अच्छी बात यह है कि यदि लोड का शक्ति-गुणांक परिवर्तित हो रहा हो तो इस मोटर की फिल्ड-वाइडिंग की धारा को परिवर्तित करके इसके द्वारा ली जाने वाली धारा का शक्ति-गुणांक भी इस प्रकार परिवर्तित किया जा सकता है कि लोड तथा यह तुल्यकालिक मोटर का सम्मिलित शक्ति-गुणांक १ हो जाय।
तुल्यकालिक मोटर का वी-वक्र सामने के चित्र में दिखाया गया है। इससे स्पष्त होता है कि रोटर का फिल्ड इक्साइटेशन बदलने पर इसके स्टेटर से ली गयी धारा का फेज बदलता है।
स्टार्ट करने की विधियाँ
- बहुत छोटी तुल्यकालिक मोटरें (जिनके रोटर का जड़त्वाघूर्ण बहुत कम होता है) सप्लाई लगाते ही चालू हो जाती हैं और बहुत अल्प समय में सिन्क्रोनस स्पीड पर चली जातीं हैं।
- किन्तु मध्यम और बड़े आकार की तुल्यकालिक मोटरें सेल्फ-स्टार्टिंग नहीं होतीं। इन्हें नीचे दी गयीं विभिन्न विधियों से चालू किया जाता है।
- कुछ बड़ी मोटरें किसी अन्य मोटर से घुमाकर सिन्क्रोनस स्पीड तक ले जायी जातीं है। किन्तु अभी तक इन पर लोड नहीं लगाया जाता। सिन्क्रोनस स्पीड पर पहुंचने पर इनके स्टेटर और रोटर को इक्साइट कर दिया जाता है, पोनी मोटर को बन्द कर दिया जाता है, लोड लगा दिया जाता है।
- कॉमर्शियल आवृत्ति (जैसे ५० हर्ट्स) पर काम करने वाली बड़ी तुल्यकालिक मोटरों के रोटर में 'स्क्वैरेल केज' वाइण्डिग भी होती है। इसके कारण यह मोटर इण्डक्सन मोटर की तरह काम करते हुए त्वरित होकर सिन्क्रोनस स्पीड के आसपास पहुंचती है। इसके बाद इसकी फिल्ड वाइण्डिंग को इक्साइट किया जाता है और मोटर सिन्क्रोनस स्पीड पकड़ लेती है। इस तरह की मोटरों की रोटर पर लगी 'स्क्वैरेल केज' वाइण्डिग का एक और लाभ भी है- यह चलते समय मोटर के रोटर में होने वाले झटकों (oscillations) को डैम्प करने में यह मदद करता है।
- आजकल परिवर्ती आवृत्ति ड्राइव (VFD) भी आ गयी हैं। इनसे चलने वाली मशीने शून्य चाल से शुरू होकर धीरे-धीरे त्वरित होती हैं। जैसे जैसे चाल बडती जाती है, इनकी आवृति क्रमशः बढायी जाती है। अन्ततः यह अन्तिम आवृत्ति और उसके संगत सिन्क्रोनस स्पीड पर चलने लगती है।
तुल्यकालिक मोटरोंके प्रकार
- तीन फेजी एसी तुल्यकालिक मोटर (Three-phase AC synchronous motors)
- Synchronous brushless wound-rotor doubly fed electric machine
- स्टेपर मोटर (Stepper motor) - यह सिन्क्रोनस भी हो सकती है और नहीं भी।
- रिलक्टैन्स मोटर (Reluctance motor) - यह सिन्क्रोनस भी हो सकती है और नहीं भी।
इन्हें भी देखें
- अल्टरनेटर
बाहरी कड़ियाँ
- Synchronous motor animation
यह लेख एक आधार है। जानकारी जोड़कर इसे बढ़ाने में विकिपीडिया की मदद करें। |
-विद्युत मोटर


